Mobile Controlled Car via Bluetooth using STM32F1 Microcontroller
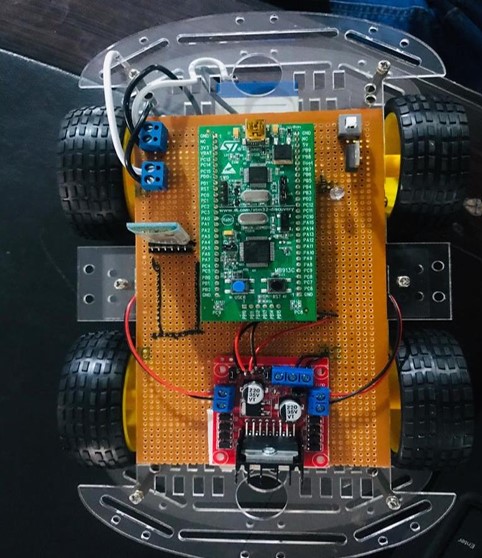
This project involved designing and building a Bluetooth-controlled robotic car using the STM32F1 microcontroller. The system allowed a user to control the car’s movement through an Android smartphone application.
The Bluetooth module (HC-05) was used to establish wireless serial communication between the phone and the microcontroller. Upon receiving commands via Bluetooth, the STM32F1 decoded and executed motor control signals to drive the car in different directions—forward, reverse, left, and right.
The car's motor driver circuit was implemented to control two DC motors based on input commands. The firmware was developed using embedded C and uploaded via STM32CubeIDE. Real-time testing verified seamless connectivity, accurate motor responses, and stable directional control.
This project provided practical experience in embedded hardware design, Bluetooth communication, and mobile interfacing for robotic applications.